Stormwater Digital Twin with Real-Time Sensor QC
EKF-based data assimilation for urban flood forecasting under sensor and model uncertainty
First Author
Yeji Kim, Jeil Oh, Matthew Bartos
Python, PipeDream, Extended Kalman Filter
Jun 2022 – Dec 2023
Published: Kim, Y., Oh, J., & Bartos, M. (2025). Sustainable Cities and Society, 105982. DOI →
Live Dashboard: Waller Creek Stormwater Digital Twin →
Overview
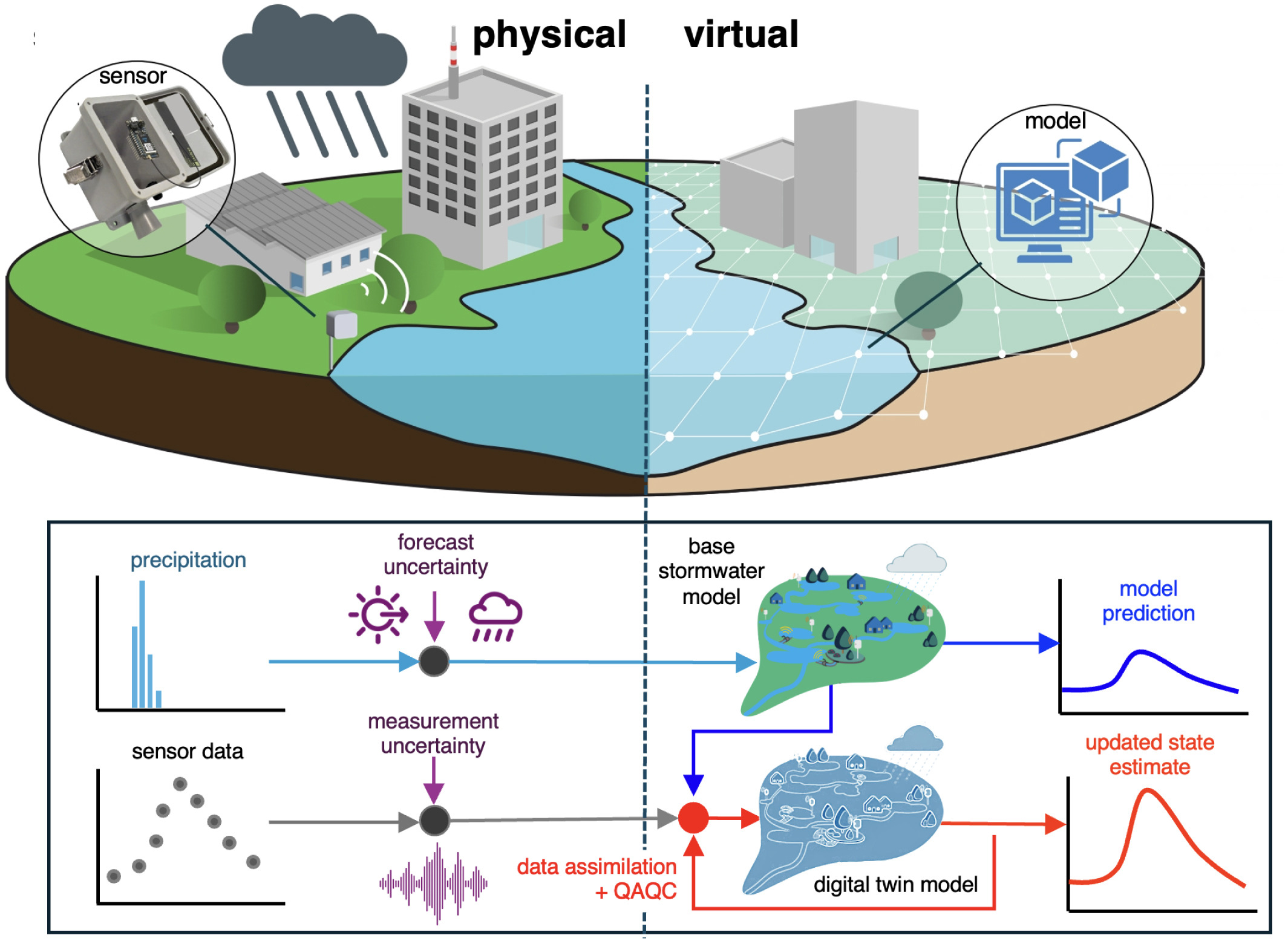
Urban drainage systems face growing flood hazards from climate change, while existing monitoring is complicated by unreliable sensor data and imperfect hydrologic models. This work introduces a stormwater digital twin that fuses real-time sensor data with a hydraulic-hydrologic model to estimate water depths and discharges under sensor and model uncertainty.
Approach
- Developed a novel Extended Kalman Filter (EKF) state estimation scheme that simultaneously assimilates sensor data and detects faulty measurements
- Long-term real-world deployment in Austin’s Waller Creek watershed
- Open-source Python software implementation enabling real-time monitoring and active control
Key Results
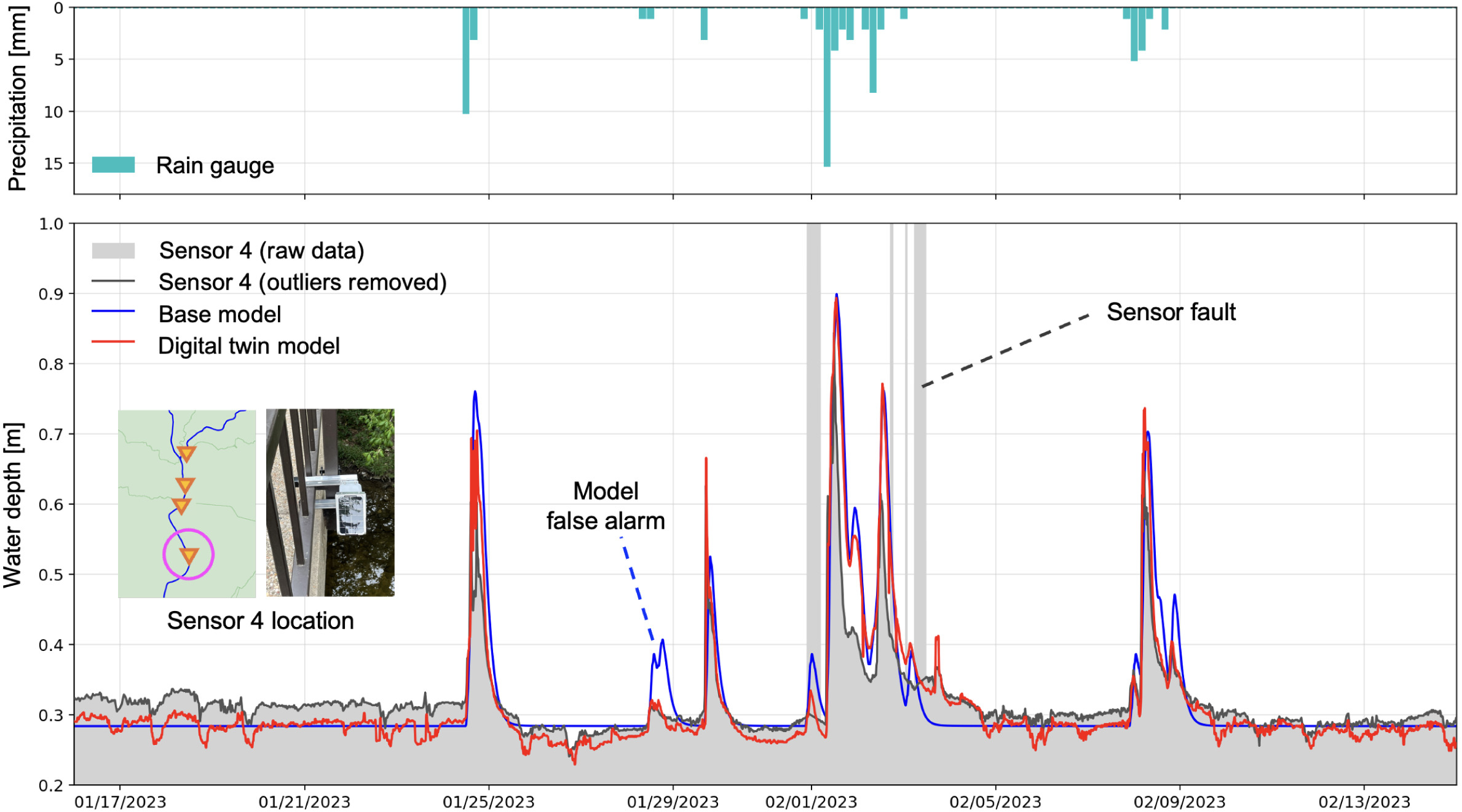
- ROC AUC > 0.99 for sensor fault detection — substantially reducing false flood alarms
- Improved water-depth estimation at ungauged locations
- More accurate near-term flood forecasts compared to a base hydraulic model
- Provides a complete framework for rapid flood response, predictive maintenance, and active control of sewer systems
Reference
Kim, Y., Oh, J., & Bartos, M. (2025). Stormwater digital twin with online quality control detects urban flood hazards under uncertainty. Sustainable Cities and Society, 105982. https://doi.org/10.1016/j.scs.2024.105982